Takeshi Ishita¶
Work Experience¶
DeNA Co., Ltd.¶
April 2018 - March 2020
Part-time job
Cookpad Inc.¶
Design and implementation of machine learning methods for ingredient recognition from food images.
Usagee Inc.¶
- Research and development of Machine Learinng & Computer Vision methods
- Providing effective solutions to customers
May 2014 - Jan 2017
Part-time job
Education¶
National Institute of Technology, Tokyo College, Advanced Course
April 2017 - March 2019
Student exchange with Metropolia University of Applied Sciences
August 2017 - December 2017
National Institute of Technology, Tokyo College
April 2012 - March 2017
My works¶
My works are available on GitHub
1. Tadataka (under development)¶
This project aims to develop a Visual SLAM framework that is flexible and simple to use.
Currently implemented algorithms:
DVO (Dense Visual Odometry) [1] [2]¶
Estimating camera motion from RGB-D video sequence (YouTube video).
Feature Based Visual Odometry¶
Estimating camera motion and 3D structure from a single RGB camera (YouTube video).
2. RoadDamageDetector¶
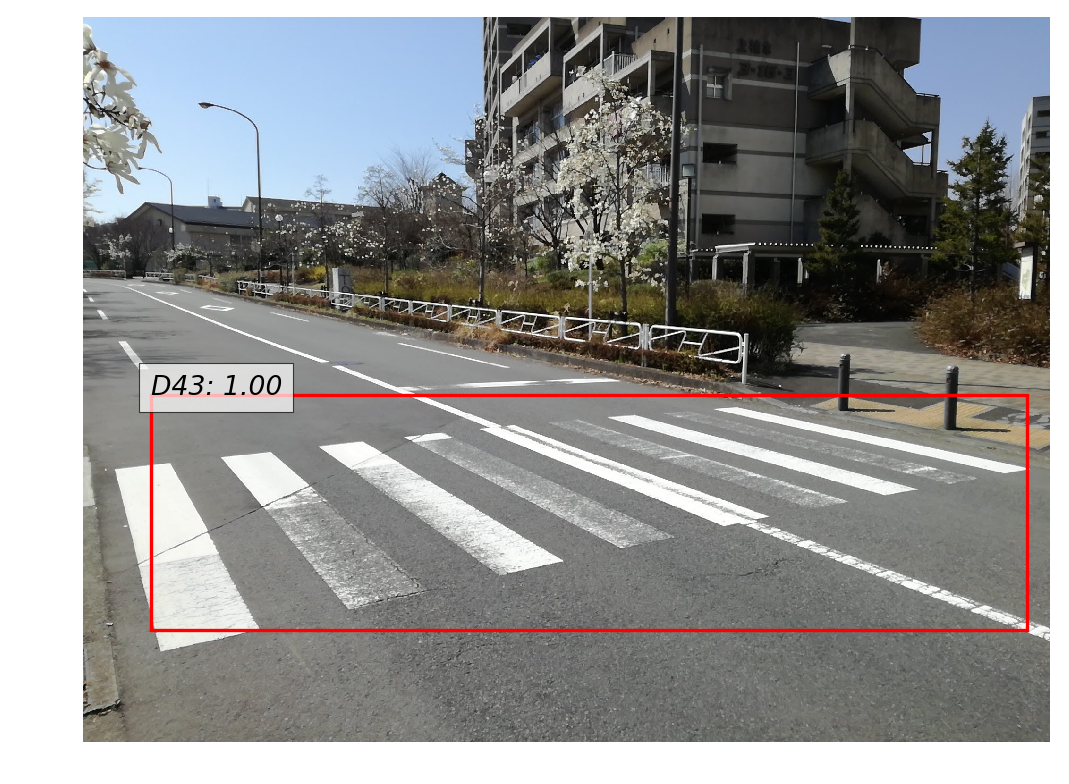
Road damage detector based on SSD (Single Shot Multibox Detector).
The detailed explanation is at my Qiita blog page (in Japanese).
Trained models are published along with the source code.
3. PCANet¶
PCANet is a neural network for image classification that trains its weights with PCA [4].
PCANet requires histogram calculation in the pooling layer. Although there was no GPU support for histogram calculation in CuPy.
I implemented the histogram calculation in CUDA and sent a pull request, which has been merged into the CuPy repository.
#298
Ensemble PCANet¶
PCANet can train quickly. On the other hand, its representation ability is not strong.
I combined PCANet with Bagging and succeeded to increase the representation ability while keeping the training speed.
This idea is proposed to JSAI 2017.
Presentations¶
References¶
| [1] | Steinbrücker Frank, Jürgen Sturm, and Daniel Cremers. “Real-time visual odometry from dense RGB-D images.” Computer Vision Workshops (ICCV Workshops), 2011 IEEE International Conference on. IEEE, 2011. |
| [2] | Kerl, Christian, Jürgen Sturm, and Daniel Cremers. “Robust odometry estimation for RGB-D cameras.” Robotics and Automation (ICRA), 2013 IEEE International Conference on. IEEE, 2013. |
| [3] | Maeda, Hiroya, et al. “Road damage detection using deep neural networks with images captured through a smartphone.” arXiv preprint arXiv:1801.09454 (2018). |
| [4] | Chan, Tsung-Han, et al. “PCANet: A simple deep learning baseline for image classification?.” IEEE transactions on image processing 24.12 (2015): 5017-5032. |
| [5] | Wang, Jialei, Peilin Zhao, and Steven CH Hoi. “Exact soft confidence-weighted learning.” arXiv preprint arXiv:1206.4612 (2012). |