カメラ座標系とワールド座標系の変換¶
OpenCVのDocumentationにある,ワールド座標系とカメラ座標系の間の変換
(1)¶\[\begin{split}\begin{bmatrix}
x \\ y \\ z
\end{bmatrix} =
R
\begin{bmatrix}
X \\ Y \\ Z
\end{bmatrix}
+
\mathbf{t}\end{split}\]
はぱっと見ただけではわかりづらいので,ワールド座標系とカメラ座標系をしっかりと定め,その間の変換(式 (1) )を導出します.
\[\newcommand{\E}{\mathbf{e}}\]
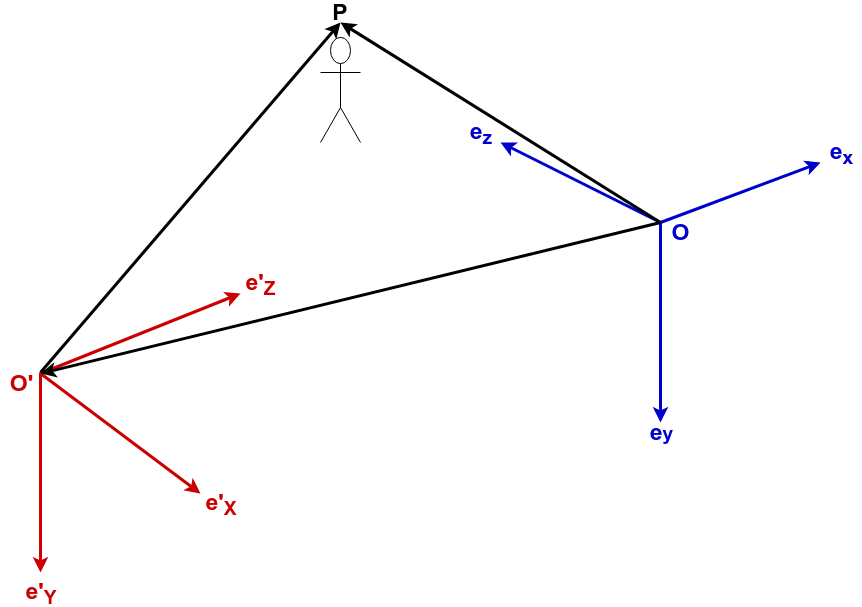
ここでは原点 \(O\) ,基底 \(\E_x\), \(\E_y\), \(\E_z\) から成る直交座標系を \(O[\E_x,\E_y,\E_z]\) と表記することにします.
また,ワールド座標系とカメラ座標系をそれぞれ次のように設定します.
| 原点を O’ としたときのワールド座標系 | \(O'[\E'_X, \E'_Y, \E'_Z]\) |
| 位置 O のカメラの座標系 | \(O[\E_x, \E_y, \E_z]\) |
カメラに映っている物体の座標を P とし,これをそれぞれの座標系で表現すると
\[\begin{split}\begin{align*}
\vec{O'P}
&= X\E'_X + Y\E'_Y + Z\E'_Z \\
&=
\begin{bmatrix}
\E'_X & \E'_Y & \E'_Z
\end{bmatrix}
\begin{bmatrix}
X \\ Y \\ Z
\end{bmatrix}
\\
\vec{OP}
&= x\E_x + y\E_y + z\E_z \\
&=
\begin{bmatrix}
\E_x & \E_y & \E_z
\end{bmatrix}
\begin{bmatrix}
x \\ y \\ z
\end{bmatrix}
\end{align*}\end{split}\]
となります.
ベクトル \(\vec{OO'}\) をカメラ座標系 \(O[\E_x, \E_y, \E_z]\) で表現すると
\[\begin{split}\begin{align*}
\vec{OO'}
&= t_x \E_x + t_y \E_y + t_z \E_z \\
&=
\begin{bmatrix}
\E_x & \E_y & \E_z
\end{bmatrix}
\begin{bmatrix}
t_x \\ t_y \\ t_z
\end{bmatrix}
\end{align*}\end{split}\]
また, \(\vec{OP} = \vec{OO'} + \vec{O'P}\) より,
(2)¶\[\begin{split}\begin{bmatrix}
\E_x & \E_y & \E_z
\end{bmatrix}
\begin{bmatrix}
x \\ y \\ z
\end{bmatrix} =
\begin{bmatrix}
\E'_X & \E'_Y & \E'_Z
\end{bmatrix}
\begin{bmatrix}
X \\ Y \\ Z
\end{bmatrix}
+
\begin{bmatrix}
\E_x & \E_y & \E_z
\end{bmatrix}
\begin{bmatrix}
t_x \\ t_y \\ t_z
\end{bmatrix}\end{split}\]
と書けます.
ワールド座標系 \(O'[\E'_X, \E'_Y,\E'_Z]\) とカメラ座標系 \(O[\E_x,\E_y,\E_z]\) はそれぞれ別々の座標系ではあるものの,どちらも同じ3次元空間に共存しており,かつ直交座標系であるため,片方の基底を用いてもう片方の基底を表現することができます.
この変換を回転行列 \(R \in \mathbb{R}^{3 \times 3}\) を用いて
\[\begin{bmatrix}
\E'_X & \E'_Y & \E'_Z
\end{bmatrix} =
\begin{bmatrix}
\E_x & \E_y & \E_z
\end{bmatrix} R\]
と表記すると,式 (2) は
\[\begin{split}\begin{bmatrix}
\E_x & \E_y & \E_z
\end{bmatrix}
\begin{bmatrix}
x \\ y \\ z
\end{bmatrix} =
\begin{bmatrix}
\E_x & \E_y & \E_z
\end{bmatrix} R
\begin{bmatrix}
X \\ Y \\ Z
\end{bmatrix}
+
\begin{bmatrix}
\E_x & \E_y & \E_z
\end{bmatrix}
\begin{bmatrix}
t_x \\ t_y \\ t_z
\end{bmatrix}\end{split}\]
と書き換えることができます.
両辺から基底部分を取り除くと
\[ \begin{align}\begin{aligned}\begin{split} \begin{bmatrix}
x \\ y \\ z
\end{bmatrix} =
R
\begin{bmatrix}
X \\ Y \\ Z
\end{bmatrix}
+
\begin{bmatrix}
t_x \\ t_y \\ t_z
\end{bmatrix}\end{split}\\.\end{aligned}\end{align} \]
さらに
\[\begin{split}\mathbf{t} =
\begin{bmatrix}
t_x \\ t_y \\ t_z
\end{bmatrix}\end{split}\]
とおけば,
\[\begin{split}\begin{bmatrix}
x \\ y \\ z
\end{bmatrix} =
R
\begin{bmatrix}
X \\ Y \\ Z
\end{bmatrix}
+
\mathbf{t}\end{split}\]
というふうに座標変換を記述することができます.